UDS
0X10服务
默认会话
- Default Session(01)
- 读取数据、故障码、重置ECU
扩展会话
- Extended Session(03)
- 解锁ECU、控制输入输出
编程会话
- Extended Session(02)
- 刷写ECU的相关服务
总而言之,在不同的会话模式下,做的事情不一样。
ECU制造商可以自定义额外会话
- 标准会话:默认会话、非默认会话(扩展、编程)
ECU一上电就处于默认会话
会话最大超时时间
进入编程会话的前提必须先进入扩展会话
10服务请求和相应的报文格式
诊断请求:10 会话子功能
否定响应:7F 10 NRC(否定响应码)
肯定响应:50 会话子功能 会话的超时时间 (协议规定两个字节来表示) 扩展的增强性的会话超时时间(也是两个字节来表示)
EXAMPLE:
请求示例: 10 02
否定响应: 7F 10 22 (先决条件不正确)
请求实例: 10 03
肯定响应: 50 03 00 32 01 F4
ISO14229 -1
规定26个诊断服务细节,也就是UDS诊断报文的细节
ISO11898(CAN协议) 中的数据帧
帧起始 仲裁域 控制域 数据域(最多8个字节) CRC域 ACK域 帧结束
UDS的诊断报文就在CAN报文的数据域
- 有时候一帧报文CAN便能传输完成(单帧传输)
- 但有时候一帧CAN报文装不下(多帧报文传输)
ISO15765-2
规定了基于CAN总线进行UDS报文传输的细节(包括四种帧)
- 单帧(SF):发送方 ------------ 接收方(首字节第一位为0)
一个单帧的UDS诊断请求CAN报文(这里面的0代表单帧,2代表后面的有效字节数)
02 10 03
一个单帧的UDS诊断响应CAN报文
06 50 03 00 32 01 F4
- 多帧,首先会发送一个首帧(FF)给接收方,然后接收方返回一个“流控帧”(FC),这个流控帧会告诉发送方,接下来该怎么继续发送,如何发送后续的帧。然后发送方按照指示会发送一个“连续帧(CF)”,然后再等待接收FC指示……
一次多帧传输UDS诊断响应的CAN报文过程
FF(第一个字节为1代表首帧):10 10 62 F1 89 44 65 76
FC(第一个字节为3代表流控帧):30 00 14
CF(第一字节为2代表连续帧):21 65 6C 6F 70 65 72 70
CF(第一字节为2代表连续帧):22 45 43 55
### UDS诊断 0X27服务,解锁ECU过程
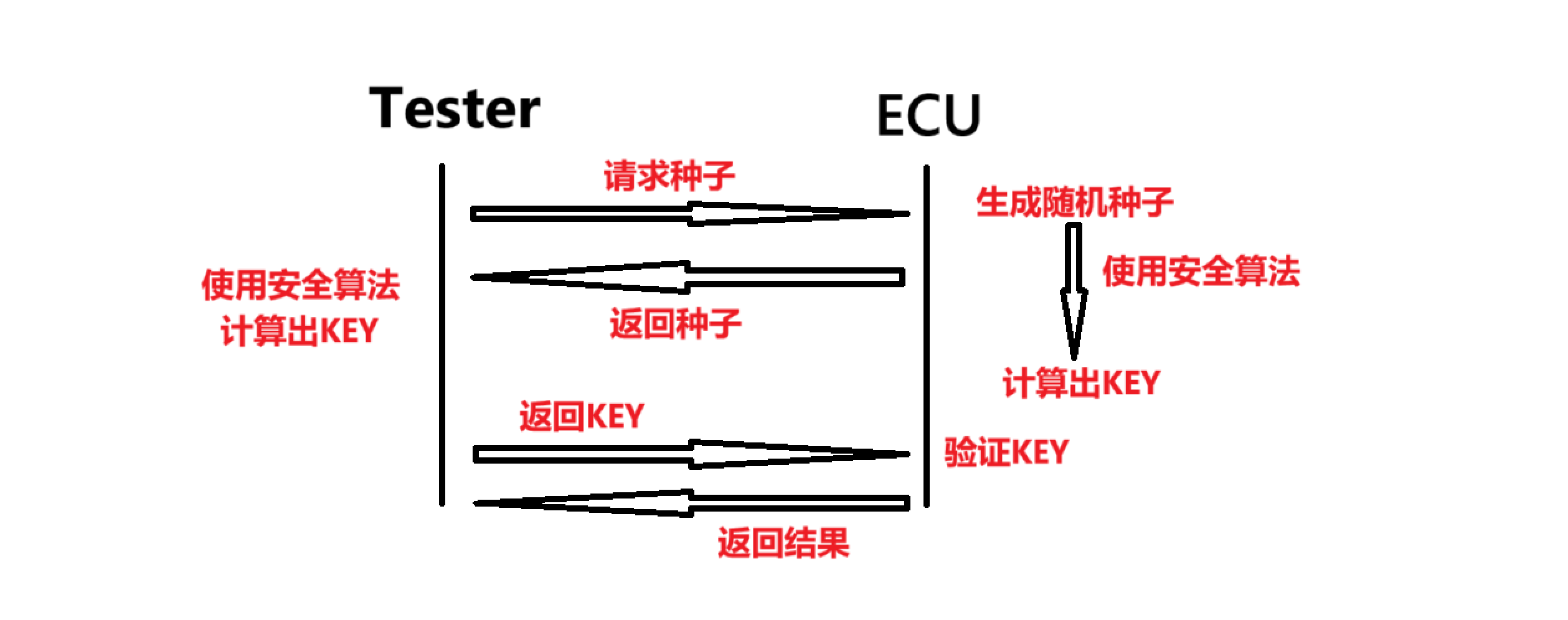
解锁ECU的27服务必须要在扩展会话下进行
ECU可以设定多个不同的安全级别
| NRC | 描述 |
|---|---|
| 0X12 | 27服务的子功能不被当前ECU所支持 |
| 0X22 | 27服务的使用的条件不正确,没有处于扩展会话状态下 |
| 0X24 | 没有经过27 01“请求种子” 服务,直接就27 02 “发送Key” 时 |
| 0X35 | 27 02 发送的Key不正确(ECU验证失败) |
| 0X36 | 到达了ECU验证Key失败的最大次数 |
| 0X37 | 到达最大失败次数后,ECU会处于不准解锁的计时等待阶段 |
UDS中的诊断故障码DTC
五位故障码(占俩个字节)
P0420
前两个比特代表故障系统:
- P(0):动力系统
- C(1):底盘系统
- B(2):车身系统
- U(3):网络系统
三四比特代表标准故障码/制造商自定义:
- 0:ISO/SAE 控制
- 1:制造商自定义
- 2:ISO/SAE控制
- 3:ISO/SAE控制
5-8比特代表故障所属的子系统
-
0-2:燃料或空气计量系统
-
3:点火系统
-
4:排放系统
-
5:车速控制系统
-
6:辅助输出系统
-
7-9:传动系统
-
A:混动驱动系统
9-16比特代表发生故障的具体部件及类型
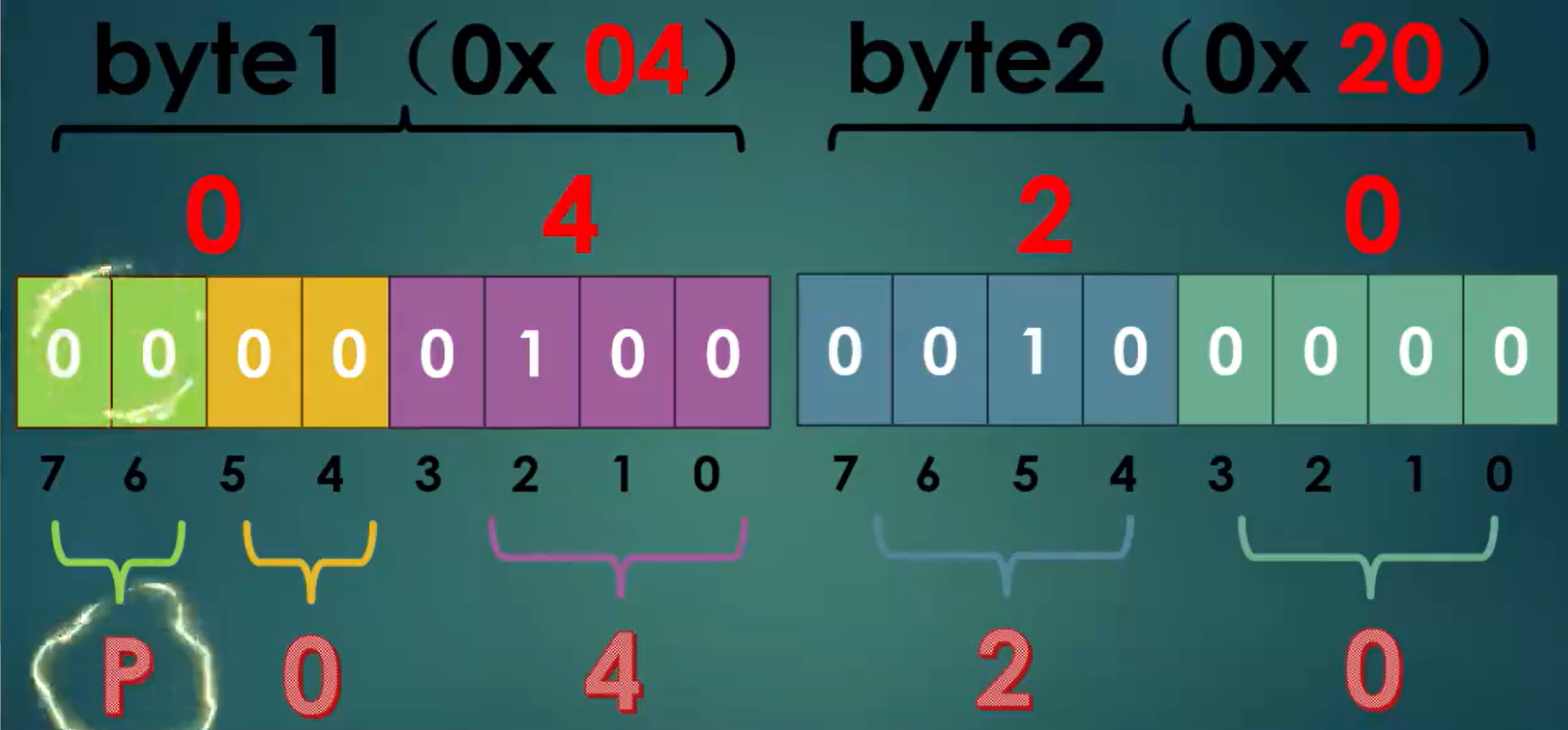
UDS中的3字节故障码
UDS中的故障码(DTC)占3个字节
车企中主要采用
Root DTC(2Byte) + FTB(1Byte)
五位故障码 + 故障类型码
P0420 00
FTB

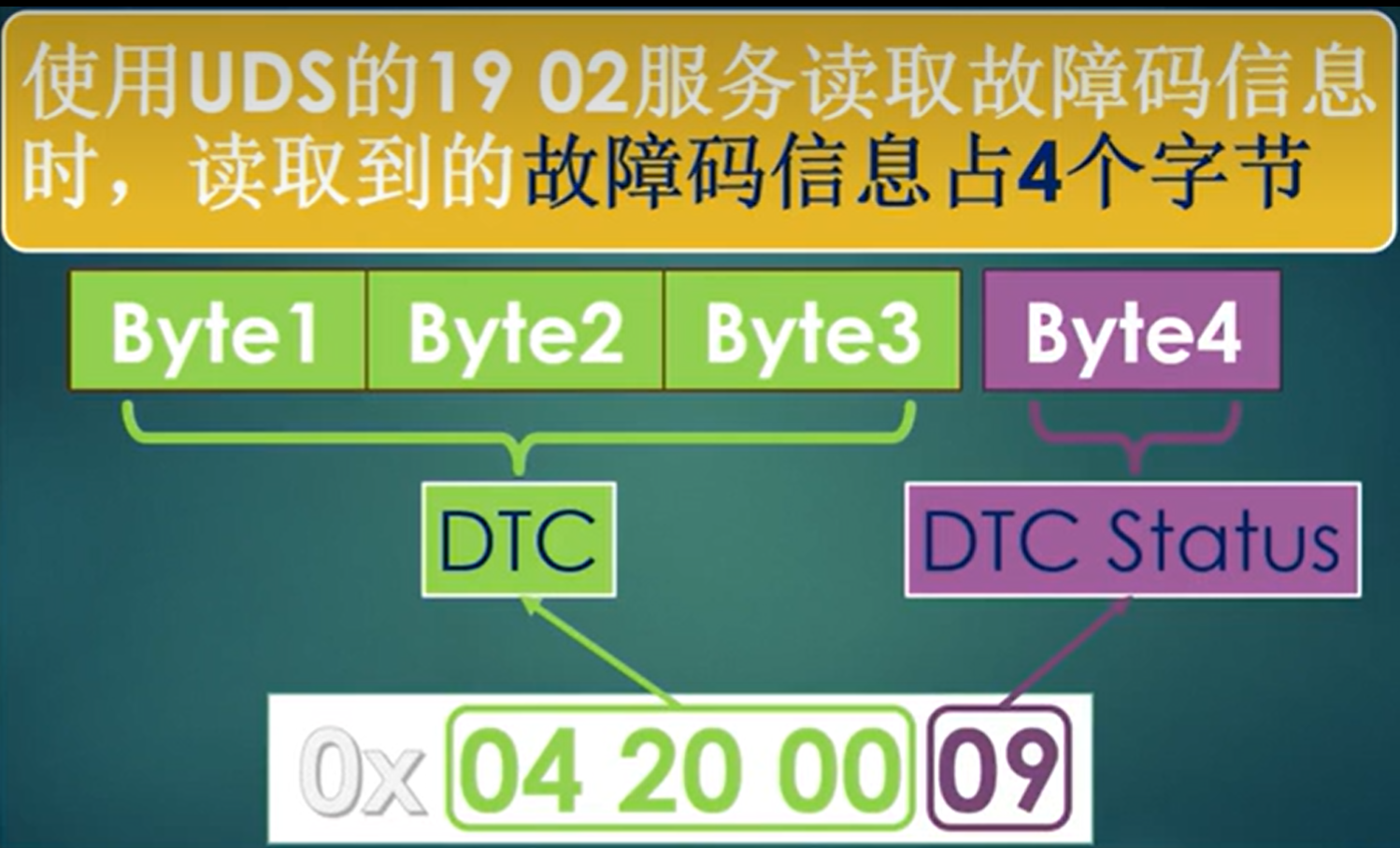
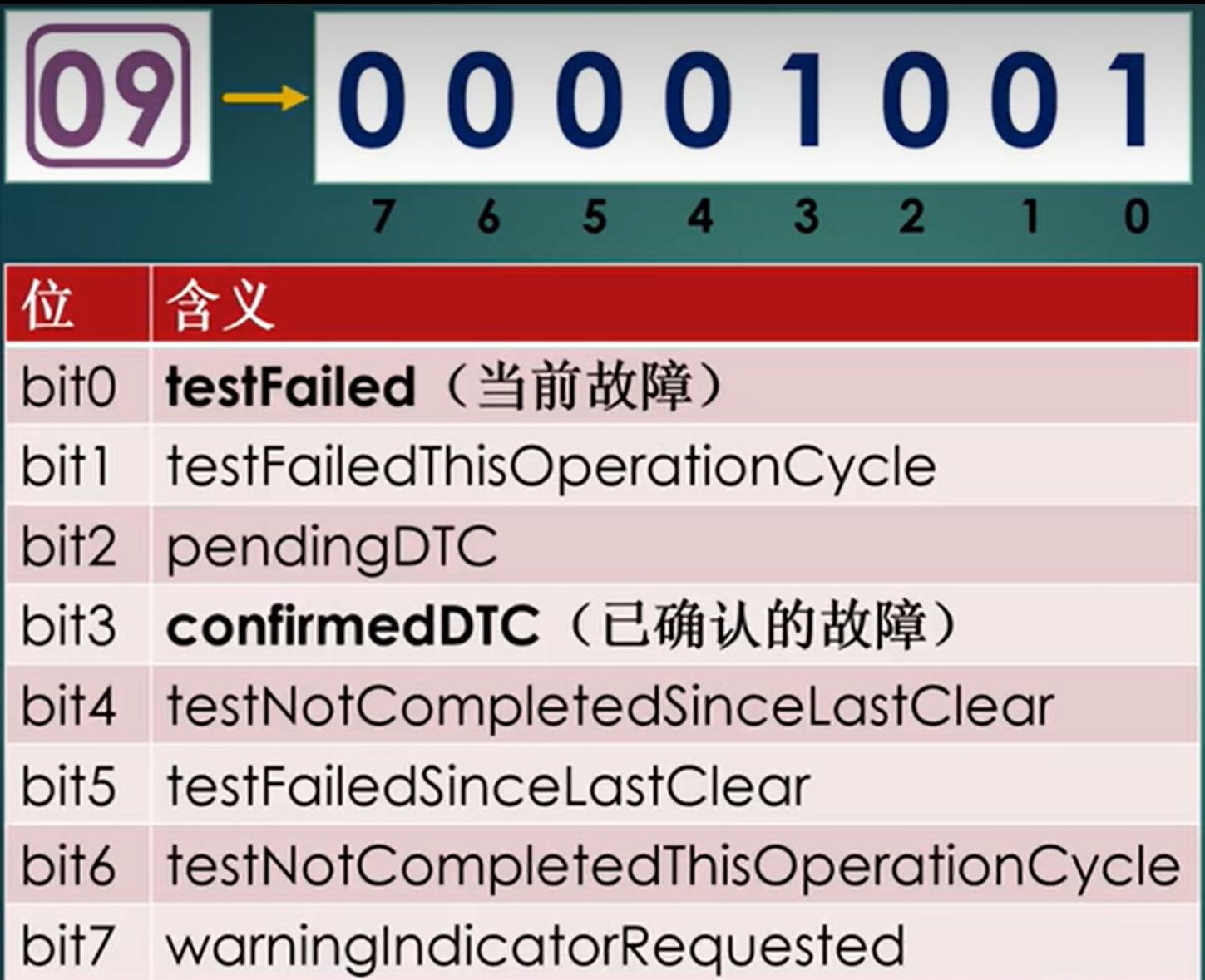
UDS故障码状态位
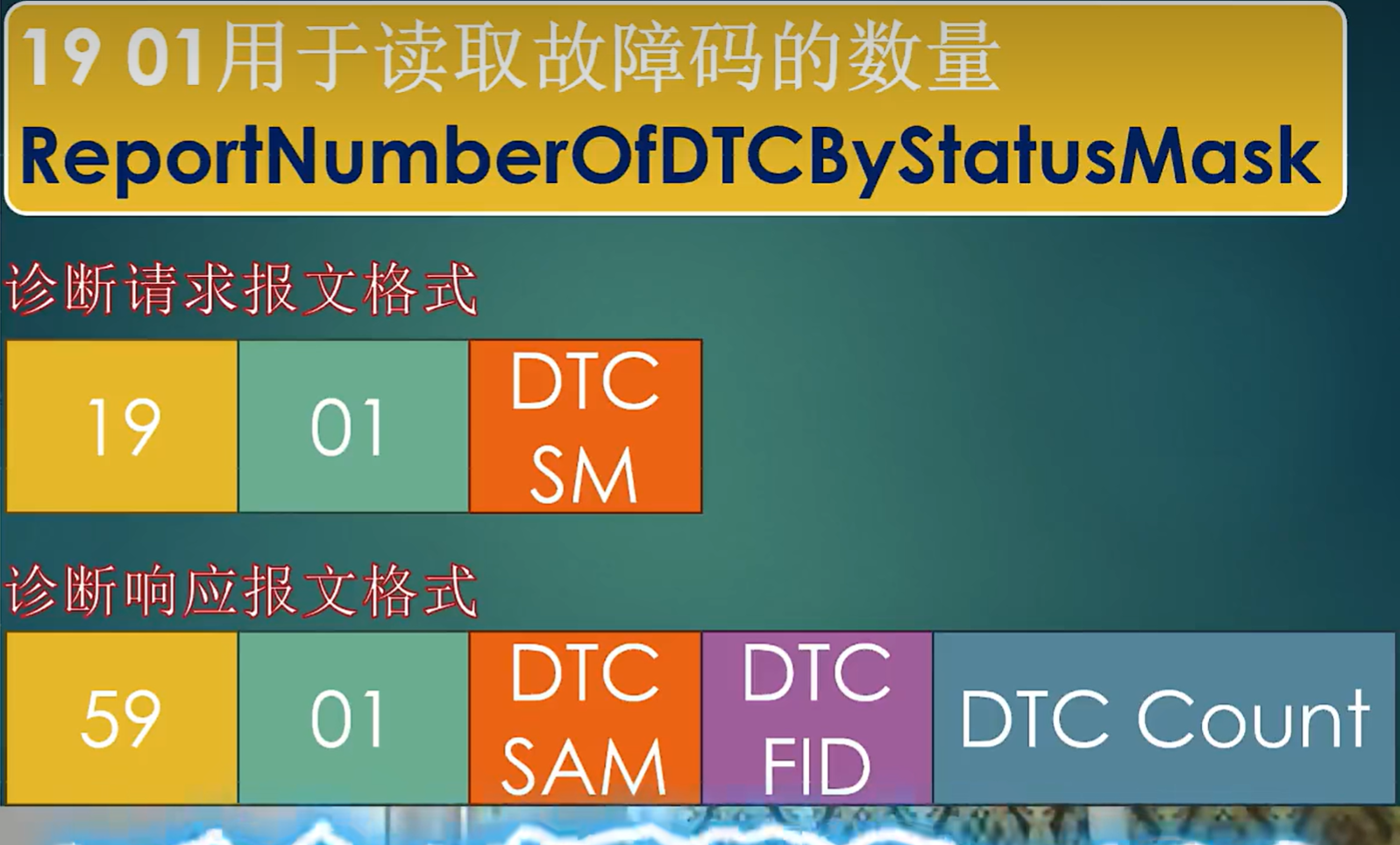
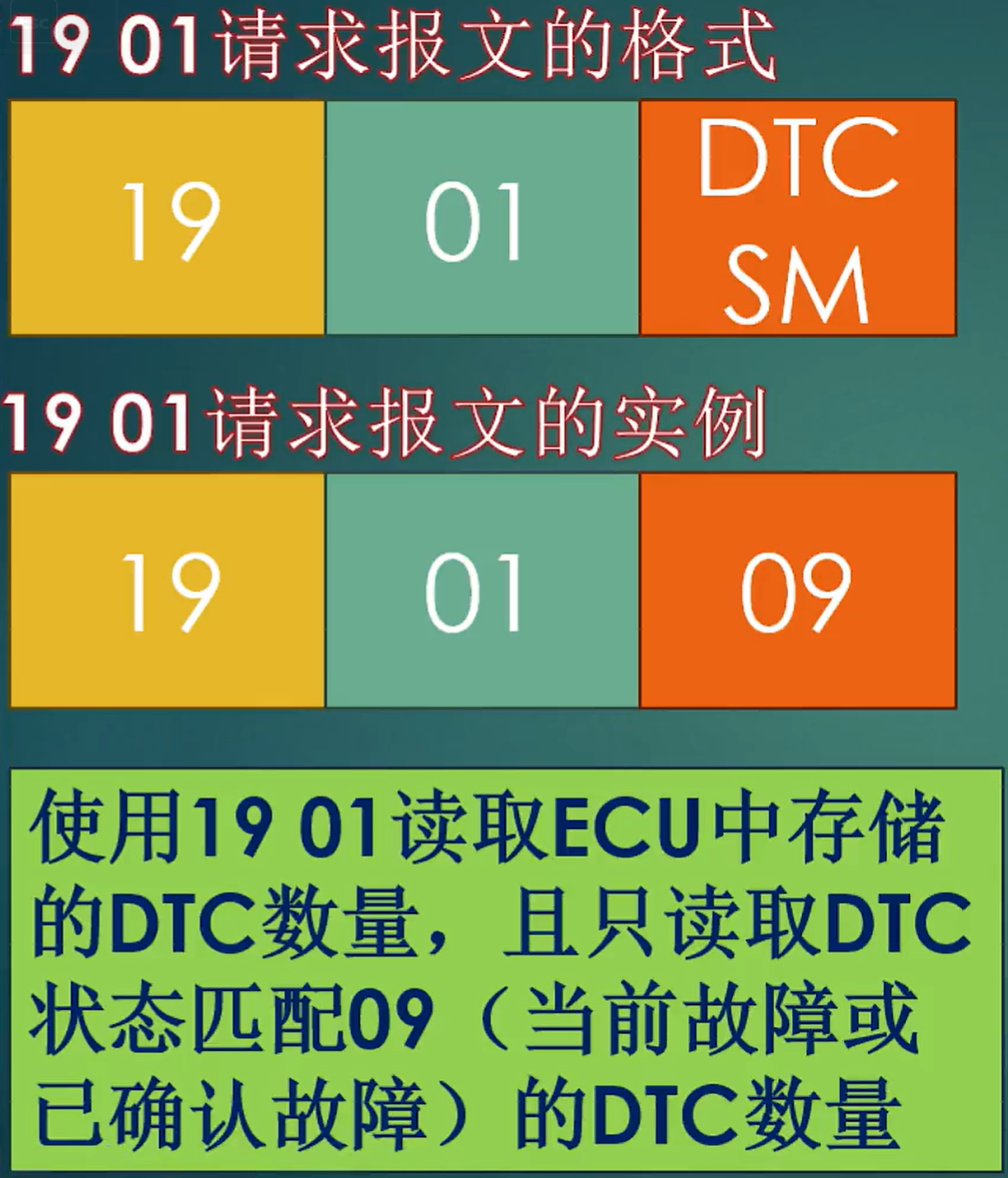
使用UDS 的19 02 服务读取故障码信息时,读取到的故障码信息占4个字节
0x19服务的01子功能
 皖ICP备2024045222号-1
皖ICP备2024045222号-1
0 条评论